
0 引言
1 数据与方法
1.1 实验数据来源
1.2 基于PPP技术获取对流层湿延迟
表1 PPP处理策略汇总表Tab.1 Summary table of PPP processing strategy |
| 参数 | 策略 |
|---|---|
| 处理模式 | 动态处理 |
| 卫星观测系统 | GPS、GLONASS、BDS |
| 观测值类型 | 伪距和载波相位 |
| 频率 | GPS/GLONASS(L1,L2),BDS(B1,B2) |
| 卫星天线相位中心改正 | igs14.atx |
| 接收机天线相位中心改正 | igs14.atx |
| 海潮改正模型 | FES2004.BLQ |
| 映射函数 | GMF |
| 相位缠绕改正 | 模型改正 |
| 相对论效应 | 模型改正 |
| 卫星轨道和钟差 | wum最终产品 |
| 接收机钟差 | 白噪声 |
| 电离层模型 | Ionosphere-Free-LC |
| 对流层模型 | 参数估计 |
| 滤波 | 扩展卡尔曼滤波 |
| 模糊度固定方法 | 浮点解/固定解 |
1.3 利用GNSS数据计算PWV的方法
1.4 利用无线电探空资料计算PWV的方法
2 数据处理与结果分析
2.1 不同采样间隔对PWV反演值的影响
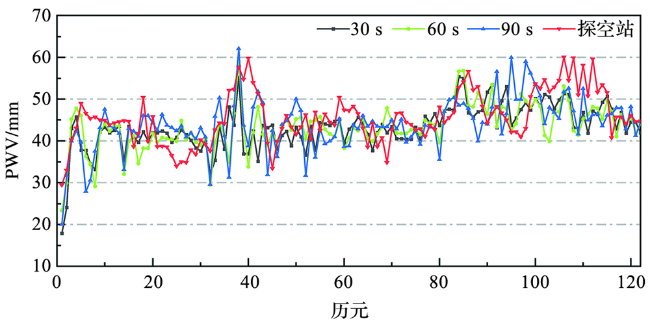
图2 不同采样间隔下的PWV反演值与探空站PWV计算值的对比Fig.2 Comparison of PWV inversion values under different sampling intervals with those calculated from sounding radiosonde station |
表2 不同采样间隔下的PWV反演值与探空站PWV计算值间的平均偏差及均方根误差统计Tab.2 Statistics of the mean deviation and root mean square error between the PWV inversion values derived from different sampling intervals and those calculated from sounding radiosonde station |
| 采样间隔/s | 平均偏差/mm | 均方根误差/mm |
|---|---|---|
| 30 | -2.36 | 6.34 |
| 60 | -2.24 | 6.54 |
| 90 | -1.72 | 7.10 |
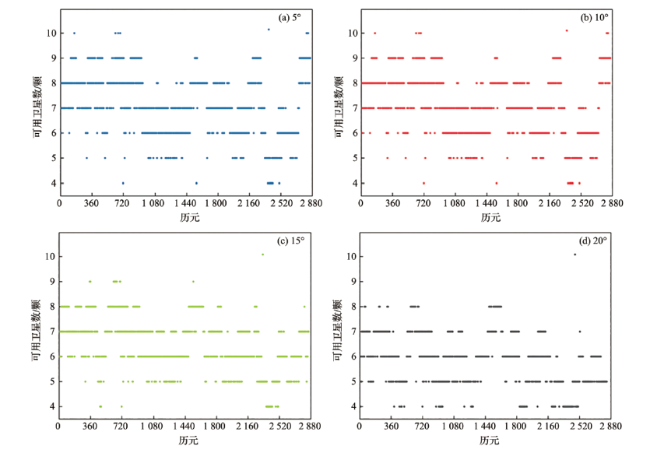
2.2 不同卫星截止高度角对PWV反演值的影响
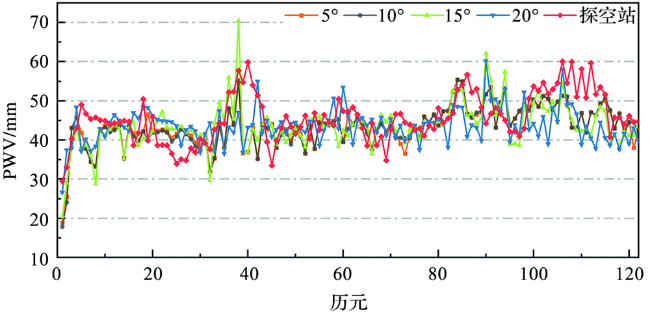
图3 不同卫星截止高度角下的PWV反演值与探空站PWV计算值的对比Fig.3 Comparison of PWV inversion values under different satellite masking angles with those calculated from sounding radiosonde station |
表3 不同卫星截止高度角下的PWV反演值与探空站PWV计算值间的平均偏差及均方根误差统计Tab.3 Statistics of the mean deviation and root mean square error between the PWV inversion values obtained under different satellite masking angles and those calculated from sounding radiosonde station |
| 卫星截止高度角/(°) | 平均偏差/mm | 均方根误差/mm |
|---|---|---|
| 5 | -2.08 | 6.38 |
| 10 | -2.36 | 6.34 |
| 15 | -2.90 | 7.26 |
| 20 | -3.42 | 7.53 |
2.3 PPP解算模式对PWV反演值的影响
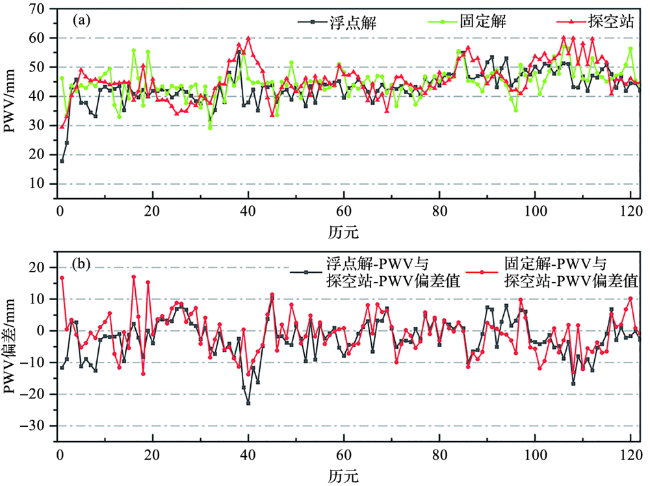
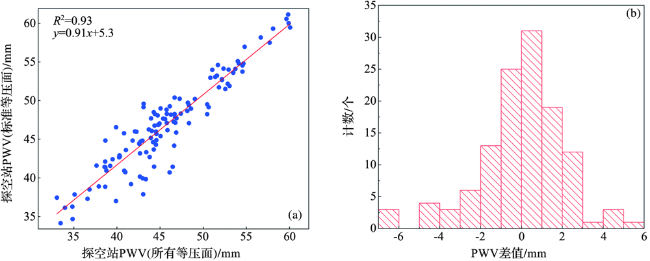
图5 不同PPP解算方式反演的PWV值与探空站PWV计算值的对比Fig.5 Comparison of PWV inversion values derived from different PPP processing methods with those calculated from sounding radiosonde station |
表4 不同PPP解算方式以及不同卫星组合反演的PWV与探空站PWV计算值间的平均偏差及均方根误差统计Tab.4 Statistics of the mean deviation and root mean square error between the PWV inverted from different PPP processing methods and satellite combinations, and those calculated from sounding radiosonde station |
| 方法 | 平均偏差/mm | 均方根误差/mm |
|---|---|---|
| 浮点解(GPS/GLONASS) | -2.36 | 6.34 |
| 固定解(GPS/GLONASS) | -0.71 | 6.27 |
| 固定解(GPS/GLONASS/BDS) | 0.23 | 5.20 |
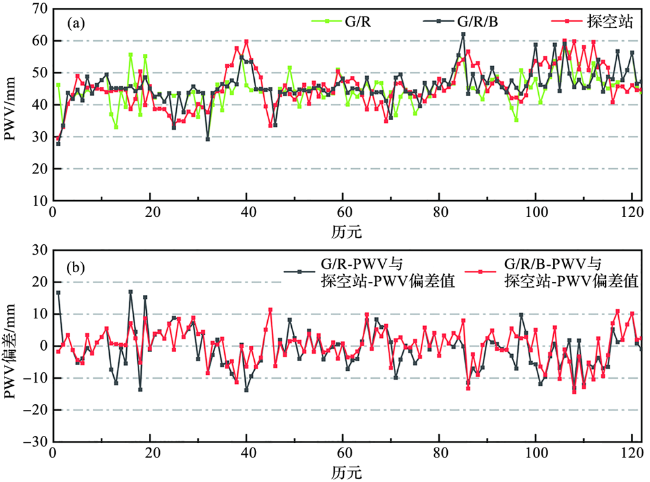
2.4 北斗系统对PWV反演值的影响
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
图6 不同卫星组合反演的PWV值与探空站PWV计算值的对比(图中G/R表示GPS/GLNOASS卫星系统的组合,G/R/B表示GPS/GLONASS/BDS卫星系统的组合。) Fig.6 Comparison of PWV inversion values derived from different satellite constellation combinations with those calculated from sounding radiosonde station (G/R represents the combination of GPS/GLONASS satellite systems, while G/R/B represents the combination of GPS/GLONASS/BDS satellite systems.) |