
0 引言
1 数据与方法
1.1 数据来源
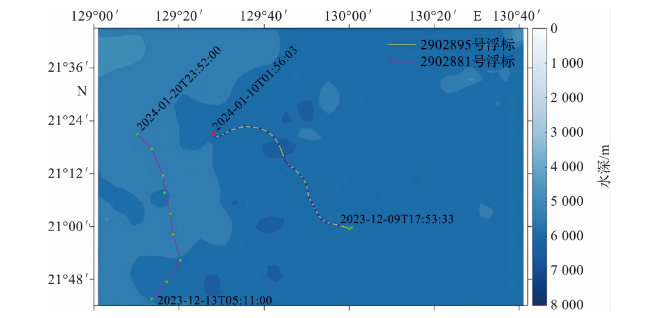
图1 2902895号浮标及其邻近浮标(WMO编号:2902881)的漂移轨迹(2902881号浮标轨迹中绿色点代表第83~91号剖面位置;2902895号浮标轨迹中红色点代表最后剖面位置,绿色叉代表第1~2号剖面位置,蓝色点代表其他剖面位置。) Fig.1 Trajectories of the float 2902895 and its nearby float 2902881 (In the trajectory of the float 2902881, the green points represent the positions of profiles 83 to 91. In the trajectory of the float 2902895, the red dot represents the last profile position; the green crosses represent the first and second profile positions, and the other profile positions are indicated by blue dots.) |
1.2 浮标盐度剖面数据校正
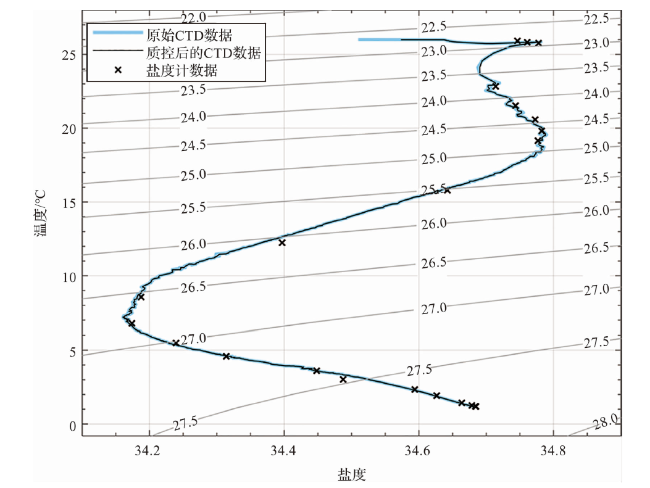
1.2.1 船载CTD数据质量控制
1.2.2 浮标观测数据实时质量控制
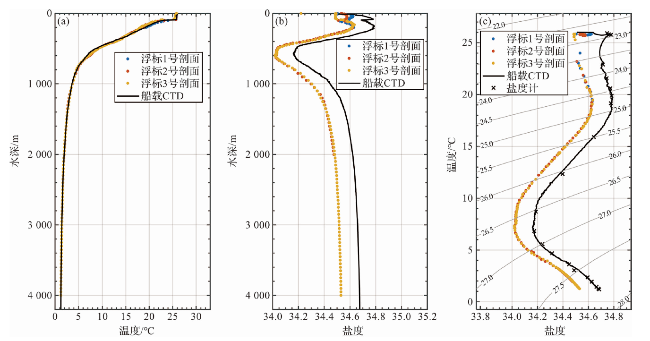
1.2.3 浮标观测数据初步检验
1.2.4 浮标盐度剖面校正
表1 浮标布放站位上盐度计分析和船载CTD测量结果Tab.1 Analysis results from the salinometer and shipboard CTD measurements at the float deployment station |
| 序号 | 采样 深度/m | 盐度计分析电导率 /(S·m-1) | 船载CTD测量电导率 /(S·m-1) |
|---|---|---|---|
| 1 | 600 | 3.465 5 | 3.464 9 |
| 2 | 700 | 3.360 6 | 3.359 4 |
| 3 | 800 | 3.291 2 | 3.291 2 |
| 4 | 1 000 | 3.225 7 | 3.225 7 |
| 5 | 1 200 | 3.186 6 | 3.189 7 |
| 6 | 1 600 | 3.155 3 | 3.154 9 |
| 7 | 2 000 | 3.140 3 | 3.140 0 |
| 8 | 3 000 | 3.148 0 | 3.147 7 |
| 9 | 4 000 | 3.179 0 | 3.178 7 |
| 10 | 5 000 | 3.219 1 | 3.218 9 |
| 11 | 5 560 | 3.243 0 | 3.242 7 |
2 结果与分析
2.1 校正后浮标盐度的验证
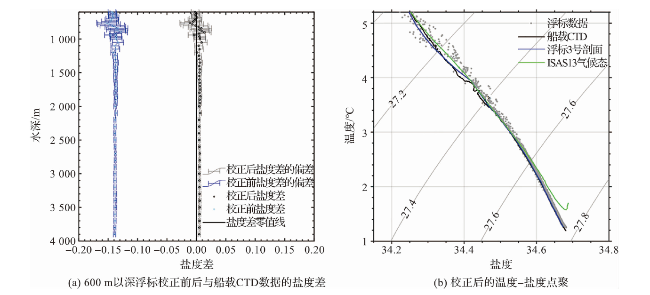
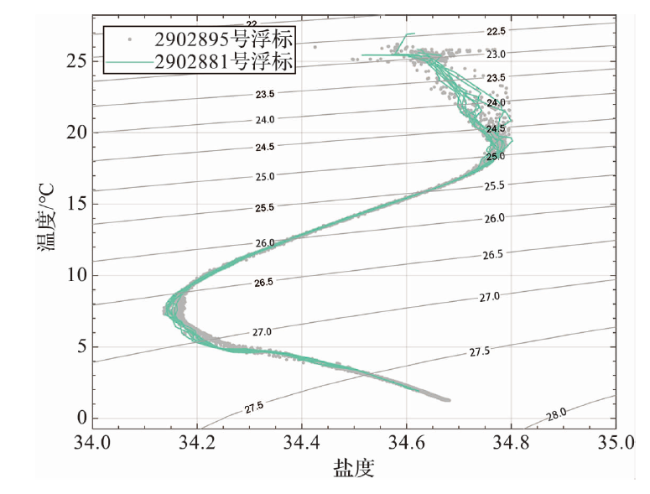
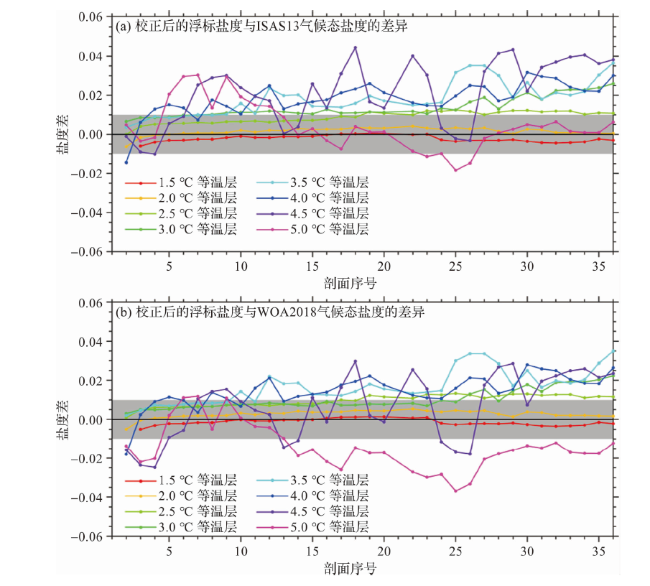
图7 校正后的浮标盐度与ISAS13(a)和WOA2018(b)气候态盐度在不同等温层上的差异(灰色阴影代表国际Argo计划±0.01盐度观测精度目标。) Fig.7 Differences between the float salinity (after calibration) and ISAS13(a) and WOA2018(b) climatological salinity at different isotherms (The gray shading denotes the target salinity accuracy of ±0.01 proposed by the international Argo program.) |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}