
0 引言
静止轨道卫星(简称“静止卫星”)具有观测频次高、观测范围广以及观测时间长等优势,已成为连续监测海洋与气象变化的重要观测平台[1]。在海洋观测中,卫星搭载的红外亮温通道直接反映海表面热辐射特征,可反演得到海面温度(sea surface temperature, SST)产品[2]。然而,随着卫星进入运行后期,传感器易发生故障[3],导致其观测的遥感影像出现不规则条带状缺失[4],影响其反演信息在空间分布上的连续性,进而影响到数据产品在不同应用场景中的可靠性,例如在台风等海洋灾害的动态监测与预警等的实时观测场景以及全球海温变化趋势、重要海洋现象(如海洋锋、海洋热浪)研究等延时分析场景。因此,开展遥感影像条带状缺失修复研究是十分必要的。
卷积神经网络(CNN)、生成对抗网络(GAN)等深度学习技术,可以自动学习图像的高级特征和复杂语义信息,成为近年来图像修复任务中的主流方法[11-12]。如ZHANG等[13]通过深度卷积神经网络模型(STS-CNN)学习遥感影像在时间、空间和光谱上的相关性,实现了影像条带状缺失的修复和重建。ZHANG等[14]基于卷积神经网络对云覆盖及云阴影遥感影像进行修复,发现以多时相影像作为辅助信息时,模型修复效果好于以单时相影像为辅助信息时。STUCKER等[15]利用多时相影像,通过卷积神经网络模型对云覆盖区进行修复,相比采用单时相影像为辅助的直接插值法,该模型修复图像的平均绝对误差(MAE)降低约10%,峰值信噪比(PSNR)提升约1 dB。
本文利用静止卫星影像连续时相数据间的相关性,构建了一种基于卷积神经网络的条带状缺失数据修复算法。通过对比不同时相辅助数据情景下的模型精度,确定静止卫星遥感影像缺失修复的最佳辅助数据方案,提高其在实时观测与延时分析中应用的可靠性。
1 研究数据与方法
1.1 数据
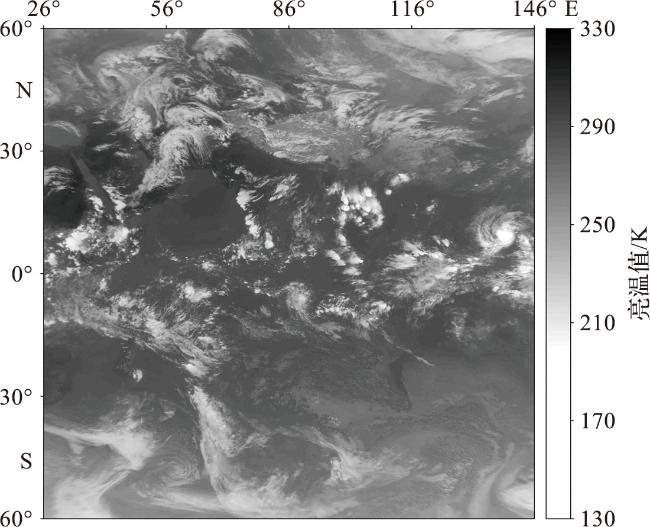
采用中国气象卫星风云二号D星(FY-2D)2015年2月、5月和8月的红外通道(IR1,10.3~11.3 μm)亮温影像数据集,数据的空间范围为26°E—146°E,60°S—60°N(图1),观测时间分辨率为1小时。
1.2 模型数据集的构建
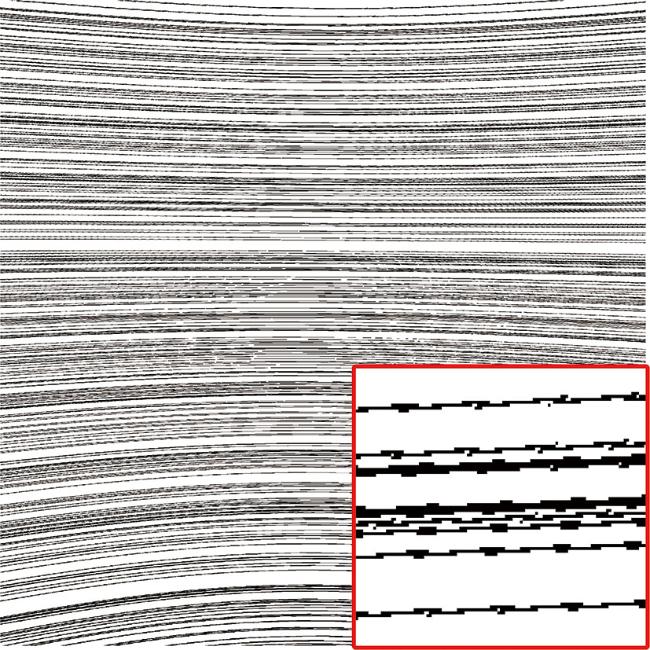
采用FY-2D红外亮温影像数据构建模型所需的数据集。从2月和5月影像数据集中筛选出无任何像素缺失的影像数据(观测完整图像),取其中一幅影像,以其生成时刻为当前时刻(t),判断其前、后各5个(以1小时为间隔)时刻(t-1,t-2,……,t-5,t+1,t+2,……,t+5)的影像是否完整,若完整,筛选出该时间序列影像。逐一对观测完整图像进行以上判断,直至筛选出所有的时间序列影像。从8月影像数据集中筛选出存在不规则条带状缺失的影像,并据此提取不规则条带状缺失掩膜(如图2所示)。在时间序列影像中,对当前时刻的影像添加不规则条带状缺失掩膜,作为待修复图像;将其余影像作为时相图像。最后,对观测完整图像、待修复图像、时相图像及条带缺失掩膜进行统一裁剪,裁剪窗口大小设为100×100像素,滑动步长为100像素,共获得19 800组样本。样本分别用作卷积神经网络模型的训练集(来自2月)和测试集(来自5月),比例约为8:2。
1.3 卷积神经网络模型
本研究构建了一种卷积神经网络模型(图3),以不同时相图像组合作为辅助信息,对静止卫星影像中的不规则条带状缺失进行修复。
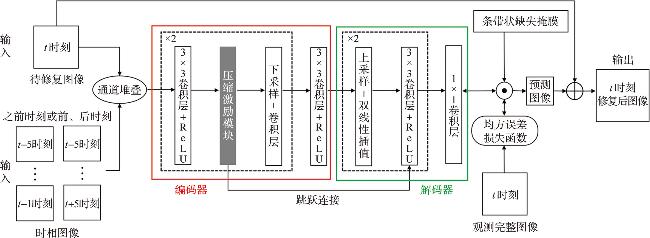
3)模型的训练和测试。在训练阶段,将用作训练的待修复图像与时相图像一同输入模型,以修复区预测像素和观测完整图像的真实像素间的均方误差(MSE)作为损失函数,通过损失函数最小化不断优化模型的修复性能。在测试阶段,将用作测试的待修复图像与时相图像一同输入模型,输出最终的修复结果,并对其进行评估。
1.4 时相辅助数据筛选实验
首先,将待修复图像与不同组合的时相图像(根据经验选取前1~5个时刻的影像或前、后各1~5个时刻的影像)输入模型,对不同时相图像组合下的修复图像进行精度评估,确定最优数量的时相图像组合。
最后,将该模型应用于MTSAT静止卫星条带状缺失数据的修复和重建,以验证本文模型在其他静止卫星数据修复任务中的适应性。
1.5 修复效果评价
采用主观和客观两种形式对模型的修复效果进行评价。主观评价是进行直观的视觉判断,客观评价则通过亮温值的MAE和像素的PSNR两个指标进行。其中,MAE越低,PSNR越高,说明修复精度越高,具体公式如下
$\text { MAE }=\frac{1}{n} \sum_{i=1}^{n}\left|R_{i}-I_{i}\right|$
$\mathrm{MSE}=\frac{1}{n} \sum_{i=1}^{n}\left(P_{i}-Q_{i}\right)^{2}$
$\operatorname{PSNR}=10 \cdot \log _{10}\left[\frac{\left(2^{B}-1\right)^{2}}{\mathrm{MSE}}\right]$
式中:n表示修复区像素数量;Ri表示修复区第i个像素处预测亮温值;Ii表示修复区第i个像素处实测亮温值;Pi表示修复区第i个像素处的预测像素值;Qi表示修复区第i个像素处实测像素值;MSE表示像素的均方误差;B为比特数,对于静止卫星影像,B=8,表示每个像素的最大值为255。
通过修复散点密度分布图展示亮温预测值误差,并计算皮尔逊相关系数R、RMSE、MAE和标准差STD。
2 结果
2.1 不同多时相图像组合作为输入时模型的修复精度
从表1可见,输入不同时相图像组合,模型输出图像的修复精度不同。在以前1个至前5个时相图像作为模型输入的组合中,以前4个时相图像为输入时,模型的修复精度最高,MAE和PSNR分别为0.728 K和44.181 dB;在以前、后的各1个至各5个时相图像作为模型输入的组合中,以前、后各3个时相图像为输入的修复精度最高,MAE和PSNR分别为0.695 K和44.470 dB。
表1 以不同的时相图像组合作为模型输入时的图像修复精度评价Tab.1 Evaluation of image reconstruction accuracy using different combinations of temporal inputs |
| 模型输入(时相图像组合) | MAE/K | PSNR/dB |
|---|---|---|
| 前1个时相 | 0.827 | 43.777 |
| 前2个时相 | 0.879 | 43.634 |
| 前3个时相 | 0.791 | 43.962 |
| 前4个时相 | 0.728 | 44.181 |
| 前5个时相 | 0.776 | 44.030 |
| 前、后各1个时相 | 0.871 | 43.728 |
| 前、后各2个时相 | 0.725 | 44.324 |
| 前、后各3个时相 | 0.695 | 44.470 |
| 前、后各4个时相 | 0.753 | 44.154 |
| 前、后各5个时相 | 0.795 | 44.023 |
因此,采用前4个时相图像作为输入时,模型可用于实时观测场景中的数据修复;采用前、后各3个时相图像作为输入时,模型可用于延时分析场景中的数据修复。
2.2 单/多时相图像为辅助的修复效果对比
分别比较了以单时相图像为辅助的NSPI、WLR、STS-CNN模型与本文模型的修复效果,均以2015年5月5日12时31分的IR1单波段图像作为修复对象,将图像分成无云陆地区、无云海洋区和云区三类,分别进行修复效果评估。
从图4可见,采用本文模型修复的图像在视觉效果上均与真实图像接近,而在与其对比的3种模型修复图像中,STS-CNN修复的图像在晴空区域出现轻微的修复痕迹,NSPI和WLR修复的图像在云边缘出现不自然的过渡。
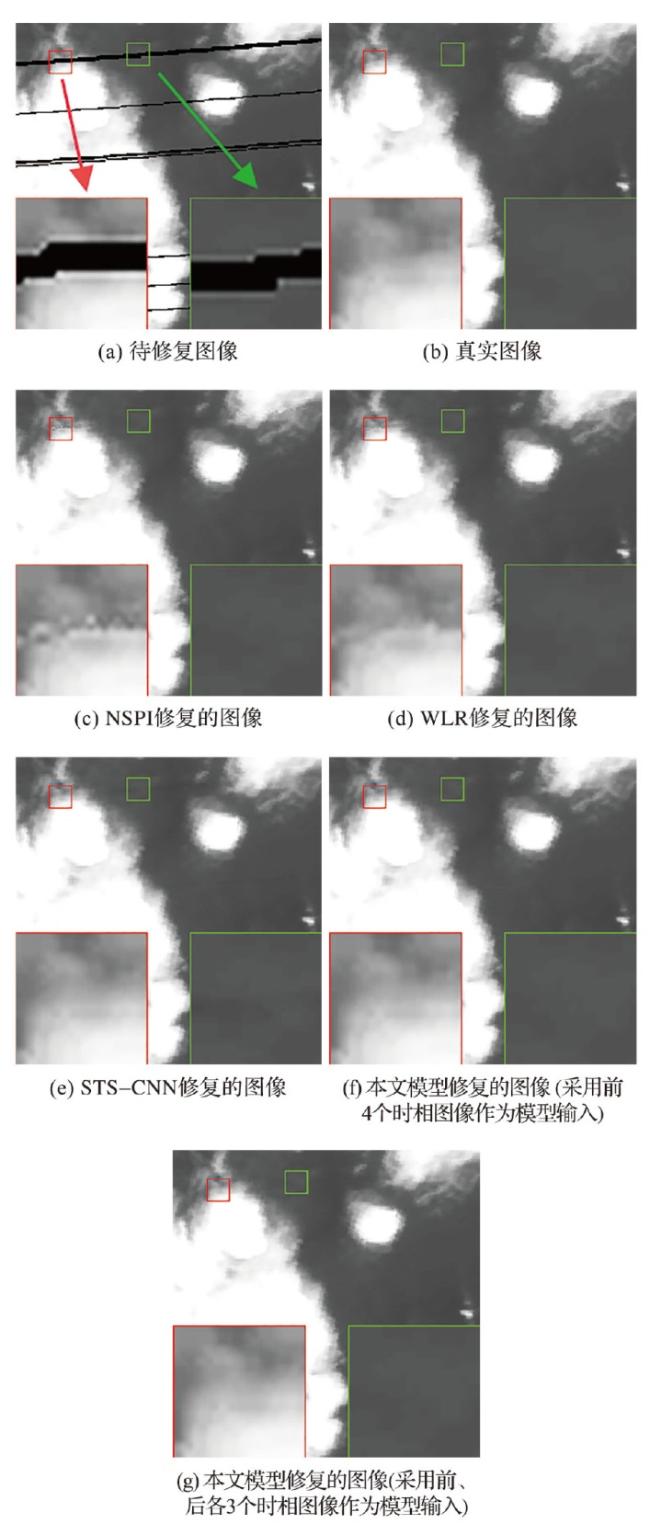
相较于NSPI、WLR和STS-CNN模型,本文模型在三种类型图像的分类上大多表现出更高的修复精度(表2)。采用前4个时相图像进行修复时,无云海洋区的MAE为0.584 K,云区的为1.118 K,具有最高的修复精度,但无云陆地区的MAE为0.882 K,相较其他3种模型精度较低;采用前、后各3个时相图像作为模型输入时,修复图像的MAE在无云陆地区为0.474 K,在无云海洋区为0.555 K,在云区为1.077 K,具有最高的修复精度。本文模型在红外亮温通道下对无云海洋区的条带状缺失修复效果显著,有效提升了后续海面温度产品的空间连续性。
表2 不同模型的修复精度Tab.2 Reconstruction accuracy of different models |
| 模型 | 无云陆地区 | 无云海洋区 | 云区 | |||||
|---|---|---|---|---|---|---|---|---|
| MAE/K | PSNR/ dB | MAE/K | PSNR/dB | MAE/K | PSNR/dB | |||
| NSPI | 0.682 | 43.095 | 1.062 | 39.641 | 1.941 | 35.662 | ||
| WLR | 0.674 | 43.682 | 0.920 | 41.299 | 1.705 | 37.209 | ||
| STS-CNN | 0.698 | 44.475 | 0.831 | 43.974 | 1.490 | 39.413 | ||
| 本文模型(采用前4个时相图像作为模型输入) | 0.882 | 43.158 | 0.584 | 45.493 | 1.118 | 41.129 | ||
| 本文模型(采用前、后各3个时相图像作为模型输入) | 0.474 | 47.391 | 0.555 | 45.662 | 1.077 | 41.535 | ||
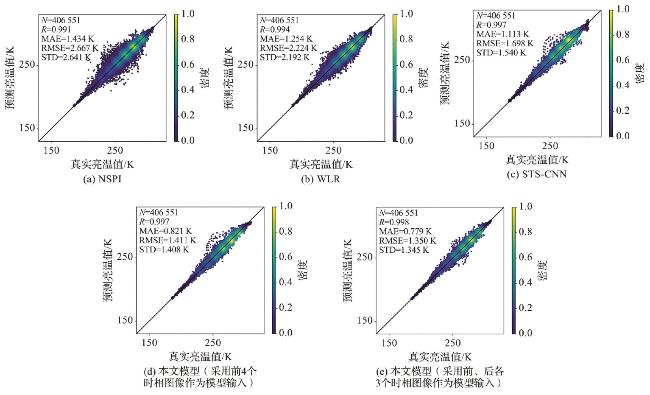
由图5可见,相比其他3种模型,本文模型修复图像的亮温值与真实图像的亮温值更接近。NSPI、WLR和STS-CNN模型的MAE在1.113 ~ 1.434 K之间,RMSE为1.698~2.667 K,而本文模型的MAE分别为0.779 K和0.821 K,RMSE分别为1.350 K和1.411 K;NSPI、WLR和STS-CNN模型的STD在1.540~2.641 K之间,而本文模型的STD分别为1.345 K和1.408 K,离散程度较低。
2.3 本文模型在其他静止卫星数据修复中的适应性
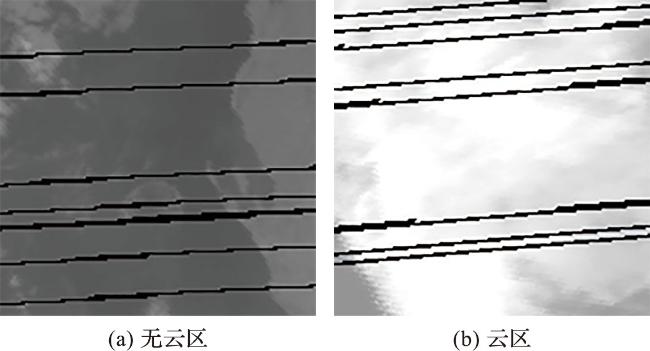
为验证本文模型对其他静止卫星数据修复的适应性,选取MTSAT静止卫星2015年5月31日18时32分的IR1单波段图像作为修复对象,采用本文模型进行修复,并对修复效果进行评价。在图像上分别截取出无云区和云区,叠加不规则条带状缺失掩膜(图6)。由于之前实验结果中无云陆地区和无云海洋区的修复精度接近,因此将二者合并为无云区。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
从表3可见,本文模型对MTSAT静止卫星数据的修复精度高,当模型输入的数据采用前4个时相图像时,修复图像在无云区的MAE为0.427 K,在云区的MAE为0.880 K;当模型输入的数据采用前、后各3个时相图像时,修复图像在无云区的MAE为0.416 K,在云区的MAE为0.877 K。可见,本文模型对MTSAT静止卫星数据的修复同样具有良好的适应性。
表3 本文模型对MTSAT数据修复的精度Tab.3 Reconstruction accuracy of the proposed model on MTSAT data |
| 模型输入 | 无云区 | 云区 | |||
|---|---|---|---|---|---|
| MAE/K | PSNR/dB | MAE/K | PSNR/dB | ||
| 前4个时相图像 | 0.427 | 48.579 | 0.880 | 42.437 | |
| 前、后各3个时相图像 | 0.416 | 48.645 | 0.877 | 42.761 | |
3 结论
针对静止卫星影像的条带状缺失,本文构建了基于卷积神经网络的数据修复模型,通过缺失数据和多时相辅助数据间的相关性,实现对条带状缺失数据的修复和重建,对比不同输入数据组合下模型修复图像的精度,确定时相辅助数据的最佳组合,为卫星图像数据在实时、延时应用场景中的修复提供参考。研究主要结论如下。
1)在采用前1个~前5个时相图像为输入的组合中,采用前4个时相图像时,修复图像的PSNR为44.181 dB,模型可用于实时观测场景下的数据修复;在采用前、后各1个~各5个时相图像为输入的组合中,采用前、后各3个时相图像时,修复图像的PSNR为44.470 dB,可用于延时分析场景下的数据修复。
2)本文模型对无云陆地、无云海洋和云区的条带状缺失均展现出较高的修复效果,修复后的图像有助于提升后续海面温度产品的空间连续性。相较于采用单时相图像为辅助的NSPI、WLR、STS-CNN模型,采用多时相为辅助的本文模型,修复图像的精度更高。
3)本文模型对其他不同静止卫星(如MTSAT)的条带状缺失数据修复同样具有适应性。